Search
information technology and software

Interactive Diagnostic Modeling Evaluator
The i-DME is a computer-user interactive procedure for repairing the system model through its abstract representation, diagnostic matrix (D-matrix) and then translating the changes back to the system model. The system model is a schematic representation of faults, tests, and their relationship in terms of nodes and arcs. D-matrix is derived from the system models propagation paths as the relationships between faults and tests. When the relation exists between fault and test, it is represented as 1 in the D-matrix. To repair the D-matrix and wrapper/test logic by playing back a sequence of nominal and failure scenarios (given), the user sets the performance criteria and accepts/declines the proposed repairs. During D-matrix repair, the interactive procedure includes conditions ranging from modifying 0s and 1s in the matrix, adding/removing the rows (failure sources) columns (tests), or modifying test/wrapper logic used to determine test results. The translation of changes to the system model is done via a process which maps each portion of the D-matrix model to the corresponding locations in the system model. Since the mapping back to the system model is non-unique, more than one candidate system model repair can be suggested. In addition to supporting the modification, it provides a trace for each modification such that a rational basis for each decision can be verified.
sensors

Detection Of Presence Of Chemical Precursors
These needs are met by this invention, which provide easy stem and associated method for detecting one or more chemical precursors (components) of a multi-component explosive compound. Different carbon nanotubes (CNTs) are loaded (by doping, impregnation, coating, or other functionalization process) for detecting of different chemical substances that are the chemical precursors, respectively, if these precursors are present in a gas to which the CNTs are exposed. After exposure to the gas, a measured electrical parameter (e.g. voltage or current that correlate to impedance, conductivity, capacitance, inductance, etc.) changes with time and concentration in a predictable manner if a selected chemical precursor is present, and will approach an asymptotic value promptly after exposure to the precursor.
The measured voltage or current are compared with one or more sequence soft heir reference values for one or more known target precursor molecules, and a most probable concentration value is estimated for each one, two, or more target molecules. An error value is computed, based on differences of voltage or current for the measured and reference values, using the most probable concentration values. Where the error value is less than a threshold, the system concludes that the target molecule is likely. Presence of one, two, or more target molecules in the gas can be sensed from a single set of measurements.
Materials and Coatings

Silicon Carbide (SiC) Fiber-Reinforced SiC Matrix Composites
Aimed at structural applications up to 2700°F, NASA's patented technologies start with two types of high-strength SiC fibers that significantly enhance the thermo-structural performance of the commercially available boron-doped and sintered small-diameter “Sylramic” SiC fiber. These enhancement processes can be done on single fibers, multi-fiber tows, or component-shaped architectural preforms without any loss in fiber strength. The processes not only enhance every fiber in the preforms and relieve their weaving stresses, but also allow the preforms to be made into more shapes. Environmental resistance is also enhanced during processing by the production of a protective in-situ grown boron-nitride (iBN) coating on the fibers. Thus the two types of converted fibers are called “Sylramic-iBN” and “Super Sylramic-iBN”.
For high CMC toughness, two separate chemical vapor infiltration (CVI) steps are used, one to apply a boron nitride coating on the fibers of the preform and the other to form the SiC-based matrix. The preforms are then heat treated not only to densify and shrink the CVI BN coating away from the SiC matrix (outside debonding), but also to increase its creep resistance, temperature capability, and thermal conductivity.
One crucial advantage in this suite of technologies lies in its unprecedented customizability. The SiC/SiC CMC can be tailored to specific conditions by down-selecting the optimum fiber, fiber coating, fiber architecture, and matrix materials and processes. In any formulation, though, the NASA-processed SiC fibers display high tensile strength and the best creep-rupture resistance of any commercial SiC fiber, with strength retention to over 2700°F.
Environment
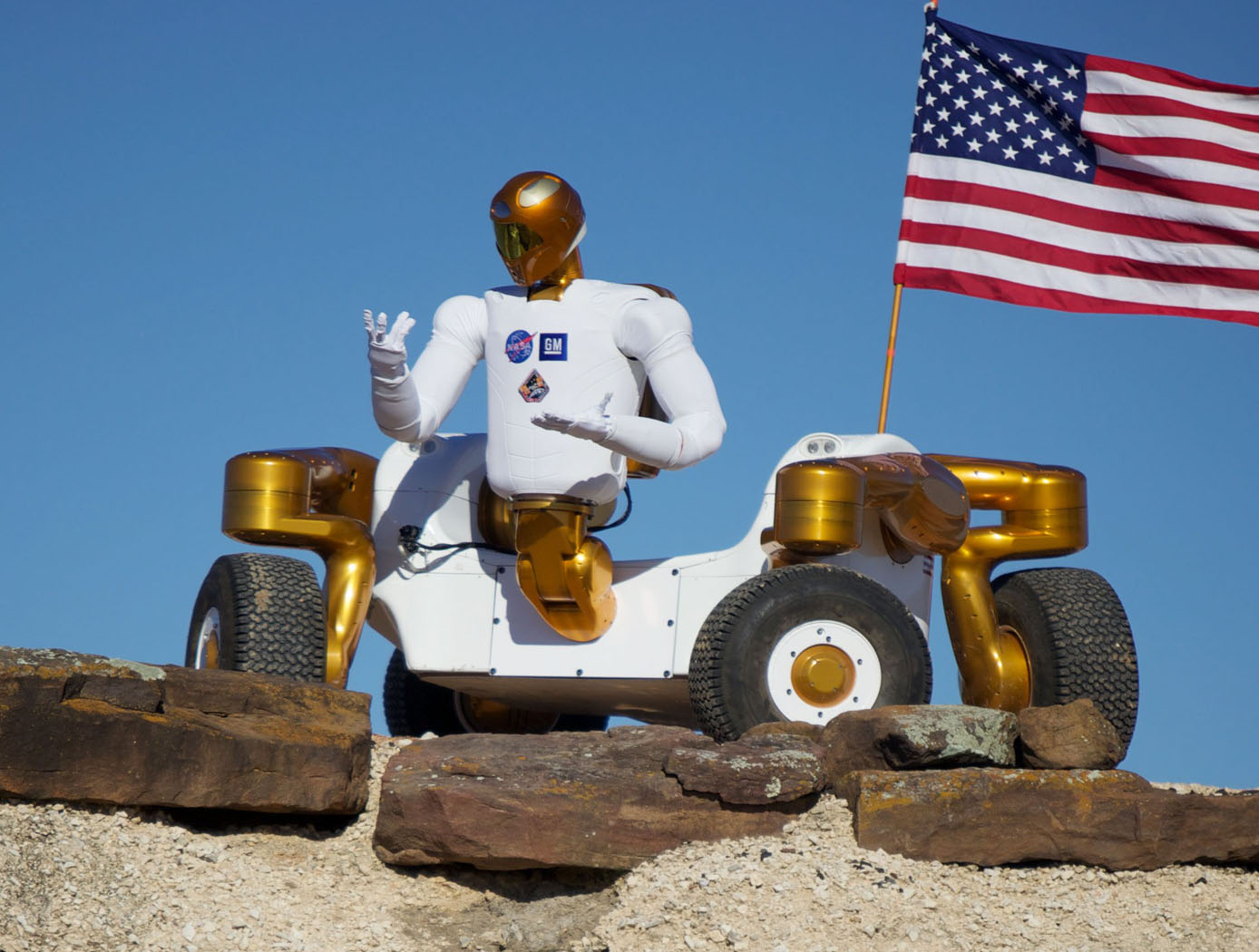
Robonaut 2: Hazardous Environments
Robonaut 2 (R2) has the capability of functioning autonomously or it can be controlled by direct teleoperations, which is advantageous for hazardous environments. When functioning autonomously, R2 understands what to do and how to do it based on sensory input. R2's torso holds the control system while the visor holds several cameras that are incorporated into the visual perception system. With these capabilities, R2 can reduce or eliminate the need for humans to be exposed to dangerous environments. R2 also has a very rugged four-wheel base called the Centaur 2. The Centaur 2 base can lower or raise itself to and from the ground and turn its wheels in any direction, allowing it to turn in place and drive forward or sideways. This enables the R2 to enter hazardous areas or tackle difficult terrain without endangering its human operator.
Robonaut 2 as a whole, or some of its components, can be an invaluable tool for land mine detection, bomb disposal, search and rescue, waste recycling, medical quarantined area, and so much more. The suite of technologies provides an ability to manipulate tools to help with a task, or it can tackle many tasks in a row, where a standard robot may not have the dexterity or sensing capability to get the job done. R2 could pick through nuclear waste, measure toxicity levels, and survey areas too remote or dangerous for human inspection. R2 could deal with improvised explosive devices, detect and dispose of bombs or landmines, and operate equipment that can break through walls or doors.
Manufacturing

Robonaut 2: Industrial Opportunities
NASA, GM, and Oceaneering approached the development of R2 from a dual use environment for both space and terrestrial application. NASA needed an astronaut assistant able to function in space and GM was looking for a robot that could function in an industrial setting. With this in mind, R2 was made with many capabilities that offer an enormous advantage in industrial environments. For example, the robot has the ability to retool and vary its tasks. Rather than a product moving from station to station on a conveyor with dozens of specialized robots performing unique tasks, R2 can handle several assembly steps at a single station, thereby reducing manufacturing floor space requirements and the need for multiple robots for the same activities. The robot can also be used in scenarios where dangerous chemicals, biological, or even nuclear materials are part of the manufacturing process.
R2 uses stereovision to locate human teammates or tools and a navigation system. The robot was also designed with special torsional springs and position feedback to control fine motor movements in the hands and arms. R2's hands and arms sense weight and pressure and stop when they come in contact with someone or something. These force sensing capabilities make R2 safe to work side-by-side with people on an assembly line, assisting them in ergonomically challenging tasks or working independently.
This NASA Technology is available for your company to license and develop into a commercial product. NASA does not manufacture products for commercial sale.
mechanical and fluid systems
Variable-Aperture Reciprocating Reed (VARR) Valve
The VARR valve has been designed to provide a variable-size aperture that proportionately changes in relation to gas flow demand. When the pressure delta between two chambers is low, the effective aperture cross-sectional area is small, while at high delta pressure the effective aperture cross-sectional area is large. This variable aperture prevents overly restricted gas flow. As shown in the drawing below, gas flow through the VARR valve is not one way. Gas flow can traverse through the device in a back-and-forth reversing flow manner or be used in a single flow direction manner. The contour shapes and spacing can be set to create a linear delta pressure vs. flow rate or other pressure functions not enabled by current standard orifices. Also, the device can be tuned to operate as a flow meter over an extremely large flow range as compared to fixed-orifice meters. As a meter, the device is capable of matching or exceeding the turbine meter ratio of 150:1 without possessing the many mechanical failure modes associated with turbine bearings, blades, and friction, etc.
mechanical and fluid systems

High-Temperature Single Crystal Preloader
For extremely high-temperature sealing applications, Glenn researchers have devised novel methods for fabricating single-crystal preloaders. NASA's high-temperature preloaders consist of investment cast or machined parts that are fabricated in various configurations from single crystal superalloys. Machined preloaders include a variety of spring configurations, compressed axially or radially, fabricated from single crystal slabs. Before machining, the slabs are carefully oriented in a special goniometer using x-diffraction techniques. This helps to maintain proper crystal orientation relative to the machined part and the applied loads. For more complex geometry components which cannot be easily and economically machined, an investment casting approach would be used. Complex preloader geometries include wire coil springs of various configurations. These single crystal preloaders would be designed with the appropriate stiffness for the intended thermal barrier/seal application and placed underneath, or integrated within, the seal/barrier. At extrememly high temperature, the preload device keeps the seal/barrier mated against the opposing surface as the gap between the two surfaces changes, maintaining contact between surfaces and preventing convective heat transfer.
Environment

Wastewater Treatment and Remediation
NASA's system was developed for smaller-scale, space-based applications. However, the technology is scalable for larger industrial and municipal water treatment applications. Implementation of the Ammonia Recovery System could significantly reduce nitrogen content from water treatment processes, meaningfully improving the quality of water. This system offers a novel way to reduce nitrogen water pollutants, while allowing for the nitrogen to be collected and reused- reducing environmental and public health risks and providing an environmentally friendly fertilizer option. NASAs environmental solutions work to sustain life on earth through space based technology
The adaptable nature of this system gives it potentially broad applications in a wide variety of industries; it is particularly ideal for on-site remediation of wastewater in places like condo complexes, hotels and water parks. Current methods of ammonia recovery could not meet NASAs mission requirements, so a new process was devised to optimize for high ammonia selectivity, simplicity, low volume , low power usage and zero contaminants in the effluent. To do this, NASA designed a novel regenerable struvite-formation system for the capture of ammonia. This system has three primary functions:
1) Removal of ammonia from wastewater using a media that is highly selective for ammonia
2) Capture of the ammonia for later use (e.g., as a fertilizer)
3) Regeneration of the capture media for reuse in the system
Sensors
Gas Sensors Based on Coated and Doped Carbon Nanotubes
A typical sensor device includes a set of interdigitated microelectrodes fabricated by photolithography on silicon wafer or an electrically insulating substrate. In preparation for fabricating the SWCNT portion of such a sensor, a batch of treated (coated or doped) SWCNTs is dispersed in a solvent. The resulting suspension of SWCNTs is drop-deposited or injected onto the area containing the interdigitated electrodes. As the solvent evaporates, the SWCNTs form a mesh that connects the electrodes. The density of the SWCNTs in the mesh can be changed by varying the concentration of SWCNTs in the suspension and/or the amount of suspension dropped on the electrode area. To enable acquisition of measurements for comparison and to gain orthogonality in the sensor array, undoped SWCNTs can be similarly formed on another, identical set of interdigitated electrodes. Coating materials tested so far include chlorosulfonated polyethylene. Dopants that have been tested include Pd, Pt, Au, Cu and Rh nanoparticle clusters. To date, the sensor has been tested for NO2, NH3, CH4, Cl2, HCl, toluene, benzene, acetone, formaldehyde and nitrotoulene.
materials and coatings

Adaptive Thermal Management System
Efficient thermal management has long been an issue in both commercial systems and in the extreme environments of space. In space exploration and habitation, significant challenges are experienced in providing fluid support systems such as cryogenic storage, life support, and habitats; or thermal control systems for launch vehicle protection, environmental heat management, or electronic instruments. Furthermore, these systems operate in dynamic, transient modes and often under extremes of temperature or pressure. The current technical requirements associated with the thermal management of these systems result in control issues as well as significant life-cycle costs.
To combat these issues, the Adaptive Thermal Management System (ATMS) was developed to help provide the capability for tanks, structural walls, or composite substrate materials to switch functionality (conductive or insulative) depending on environmental conditions or applied stimuli. As a result, the ATMS provides the ability to adapt between both heating and cooling modes within a single system. For example, shape memory alloy (SMA) elements are used to actuate at certain design temperatures to create a conductive bridge between two metal plates allowing broad-area heat rejection from the hotter surface. Upon cooling to the lower design set-point, the SMA elements return to their original shapes, thereby breaking the conductive path and returning the system to its overall insulative state.
This technology has the potential to be applied to any system that would have the need for a self-regulating thermal management system that allows for heat transfer from one side to another.

